Difference of Normals Based Segmentation
In this tutorial we will learn how to use Difference of Normals features, implemented in the pcl::DifferenceOfNormalsEstimation class, for scale-based segmentation of unorganized point clouds.
This algorithm performs a scale based segmentation of the given input point cloud, finding points that belong within the scale parameters given.
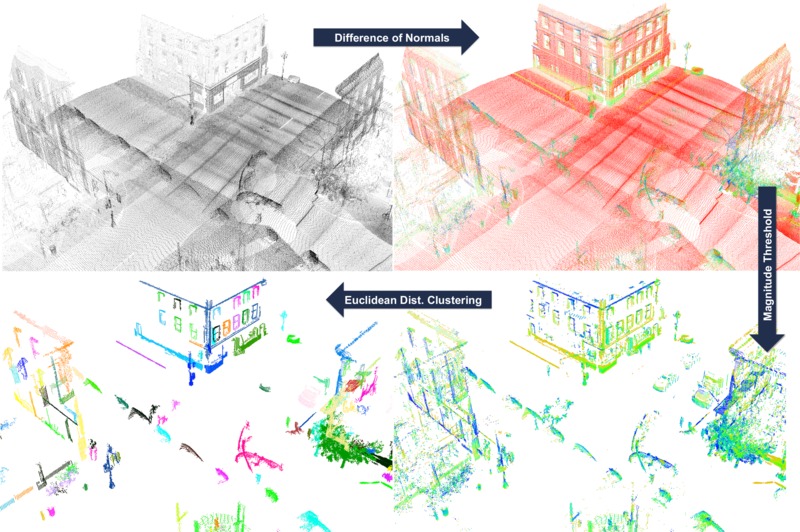
Overview of the pipeline in DoN segmentation.
Theoretical Primer
The Difference of Normals (DoN) provides a computationally efficient, multi-scale approach to processing large unorganized 3D point clouds. The idea is very simple in concept, and yet surprisingly effective in the segmentation of scenes with a wide variation of scale. For each point  in a pointcloud
in a pointcloud  , two unit point normals
, two unit point normals  are estimated with different radii,
are estimated with different radii,  . The normalized (vector) difference of these point normals defines the operator.
. The normalized (vector) difference of these point normals defines the operator.
Formally the Difference of Normals operator is defined,

where  ,
,  , and
, and  is the surface normal estimate at point , given the support radius
is the surface normal estimate at point , given the support radius  . Notice, the response of the operator is a normalized vector field, and is thus orientable (the resulting direction is a key feature), however the operator’s norm often provides an easier quantity to work with, and is always in the range
. Notice, the response of the operator is a normalized vector field, and is thus orientable (the resulting direction is a key feature), however the operator’s norm often provides an easier quantity to work with, and is always in the range  .
.

Illustration of the effect of support radius on estimated surface normals for a point cloud.
The primary motivation behind DoN is the observation that surface normals estimated at any given radius reflect the underlying geometry of the surface at the scale of the support radius. Although there are many different methods of estimating the surface normals, normals are always estimated with a support radius (or via a fixed number of neighbours). This support radius determines the scale in the surface structure which the normal represents.
The above diagram illustrates this effect in 1D. Normals,  , and tangents,
, and tangents,  , estimated with a small support radius
, estimated with a small support radius  are affected by small-scale surface structure (and similarly by noise). On the other hand, normals and tangent planes estimated with a large support radius $r_l$ are less affected by small-scale structure, and represent the geometry of larger scale surface structures. In fact a similar set of features is seen in the DoN feature vectors for real-world street curbs in a LiDAR image shown below.
are affected by small-scale surface structure (and similarly by noise). On the other hand, normals and tangent planes estimated with a large support radius $r_l$ are less affected by small-scale structure, and represent the geometry of larger scale surface structures. In fact a similar set of features is seen in the DoN feature vectors for real-world street curbs in a LiDAR image shown below.
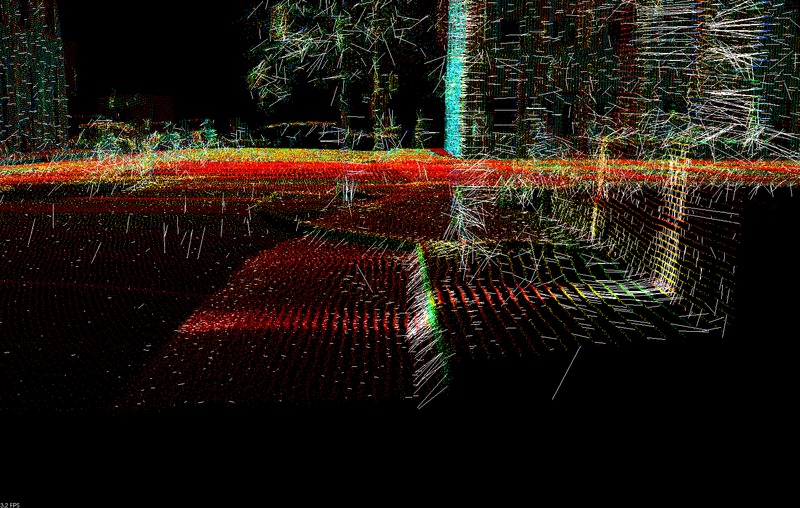
Closeup of the DoN feature vectors calculated for a LiDAR pointcloud of a street curb.
For more comprehensive information, please refer to the article [DON2012].
Using Difference of Normals for Segmentation
For segmentation we simply perform the following:
Estimate the normals for every point using a large support radius of
Estimate the normals for every point using the small support radius of
For every point the normalized difference of normals for every point, as defined above.
Filter the resulting vector field to isolate points belonging to the scale/region of interest.


The Data Set
For this tutorial we suggest the use of publicly available (creative commons licensed) urban LiDAR data from the [KITTI] project. This data is collected from a Velodyne LiDAR scanner mounted on a car, for the purpose of evaluating self-driving cars. To convert the data set to PCL compatible point clouds please see [KITTIPCL]. Examples and an example data set will be posted here in future as part of the tutorial.
The Code
Next what you need to do is to create a file don_segmentation.cpp in any editor you prefer and copy the following code inside of it:
1/**
2 * @file don_segmentation.cpp
3 * Difference of Normals Example for PCL Segmentation Tutorials.
4 *
5 * @author Yani Ioannou
6 * @date 2012-09-24
7 */
8#include <string>
9
10#include <pcl/point_types.h>
11#include <pcl/io/pcd_io.h>
12#include <pcl/search/organized.h>
13#include <pcl/search/kdtree.h>
14#include <pcl/features/normal_3d_omp.h>
15#include <pcl/filters/conditional_removal.h>
16#include <pcl/segmentation/extract_clusters.h>
17
18#include <pcl/features/don.h>
19
20using namespace pcl;
21
22int
23main (int argc, char *argv[])
24{
25 ///The smallest scale to use in the DoN filter.
26 double scale1;
27
28 ///The largest scale to use in the DoN filter.
29 double scale2;
30
31 ///The minimum DoN magnitude to threshold by
32 double threshold;
33
34 ///segment scene into clusters with given distance tolerance using euclidean clustering
35 double segradius;
36
37 if (argc < 6)
38 {
39 std::cerr << "usage: " << argv[0] << " inputfile smallscale largescale threshold segradius" << std::endl;
40 exit (EXIT_FAILURE);
41 }
42
43 /// the file to read from.
44 std::string infile = argv[1];
45 /// small scale
46 std::istringstream (argv[2]) >> scale1;
47 /// large scale
48 std::istringstream (argv[3]) >> scale2;
49 std::istringstream (argv[4]) >> threshold; // threshold for DoN magnitude
50 std::istringstream (argv[5]) >> segradius; // threshold for radius segmentation
51
52 // Load cloud in blob format
53 pcl::PCLPointCloud2 blob;
54 pcl::io::loadPCDFile (infile.c_str (), blob);
55 pcl::PointCloud<PointXYZRGB>::Ptr cloud (new pcl::PointCloud<PointXYZRGB>);
56 pcl::fromPCLPointCloud2 (blob, *cloud);
57
58 // Create a search tree, use KDTreee for non-organized data.
59 pcl::search::Search<PointXYZRGB>::Ptr tree;
60 if (cloud->isOrganized ())
61 {
62 tree.reset (new pcl::search::OrganizedNeighbor<PointXYZRGB> ());
63 }
64 else
65 {
66 tree.reset (new pcl::search::KdTree<PointXYZRGB> (false));
67 }
68
69 // Set the input pointcloud for the search tree
70 tree->setInputCloud (cloud);
71
72 if (scale1 >= scale2)
73 {
74 std::cerr << "Error: Large scale must be > small scale!" << std::endl;
75 exit (EXIT_FAILURE);
76 }
77
78 // Compute normals using both small and large scales at each point
79 pcl::NormalEstimationOMP<PointXYZRGB, PointNormal> ne;
80 ne.setInputCloud (cloud);
81 ne.setSearchMethod (tree);
82
83 /**
84 * NOTE: setting viewpoint is very important, so that we can ensure
85 * normals are all pointed in the same direction!
86 */
87 ne.setViewPoint (std::numeric_limits<float>::max (), std::numeric_limits<float>::max (), std::numeric_limits<float>::max ());
88
89 // calculate normals with the small scale
90 std::cout << "Calculating normals for scale..." << scale1 << std::endl;
91 pcl::PointCloud<PointNormal>::Ptr normals_small_scale (new pcl::PointCloud<PointNormal>);
92
93 ne.setRadiusSearch (scale1);
94 ne.compute (*normals_small_scale);
95
96 // calculate normals with the large scale
97 std::cout << "Calculating normals for scale..." << scale2 << std::endl;
98 pcl::PointCloud<PointNormal>::Ptr normals_large_scale (new pcl::PointCloud<PointNormal>);
99
100 ne.setRadiusSearch (scale2);
101 ne.compute (*normals_large_scale);
102
103 // Create output cloud for DoN results
104 PointCloud<PointNormal>::Ptr doncloud (new pcl::PointCloud<PointNormal>);
105 copyPointCloud (*cloud, *doncloud);
106
107 std::cout << "Calculating DoN... " << std::endl;
108 // Create DoN operator
109 pcl::DifferenceOfNormalsEstimation<PointXYZRGB, PointNormal, PointNormal> don;
110 don.setInputCloud (cloud);
111 don.setNormalScaleLarge (normals_large_scale);
112 don.setNormalScaleSmall (normals_small_scale);
113
114 if (!don.initCompute ())
115 {
116 std::cerr << "Error: Could not initialize DoN feature operator" << std::endl;
117 exit (EXIT_FAILURE);
118 }
119
120 // Compute DoN
121 don.computeFeature (*doncloud);
122
123 // Save DoN features
124 pcl::PCDWriter writer;
125 writer.write<pcl::PointNormal> ("don.pcd", *doncloud, false);
126
127 // Filter by magnitude
128 std::cout << "Filtering out DoN mag <= " << threshold << "..." << std::endl;
129
130 // Build the condition for filtering
131 pcl::ConditionOr<PointNormal>::Ptr range_cond (
132 new pcl::ConditionOr<PointNormal> ()
133 );
134 range_cond->addComparison (pcl::FieldComparison<PointNormal>::ConstPtr (
135 new pcl::FieldComparison<PointNormal> ("curvature", pcl::ComparisonOps::GT, threshold))
136 );
137 // Build the filter
138 pcl::ConditionalRemoval<PointNormal> condrem;
139 condrem.setCondition (range_cond);
140 condrem.setInputCloud (doncloud);
141
142 pcl::PointCloud<PointNormal>::Ptr doncloud_filtered (new pcl::PointCloud<PointNormal>);
143
144 // Apply filter
145 condrem.filter (*doncloud_filtered);
146
147 doncloud = doncloud_filtered;
148
149 // Save filtered output
150 std::cout << "Filtered Pointcloud: " << doncloud->size () << " data points." << std::endl;
151
152 writer.write<pcl::PointNormal> ("don_filtered.pcd", *doncloud, false);
153
154 // Filter by magnitude
155 std::cout << "Clustering using EuclideanClusterExtraction with tolerance <= " << segradius << "..." << std::endl;
156
157 pcl::search::KdTree<PointNormal>::Ptr segtree (new pcl::search::KdTree<PointNormal>);
158 segtree->setInputCloud (doncloud);
159
160 std::vector<pcl::PointIndices> cluster_indices;
161 pcl::EuclideanClusterExtraction<PointNormal> ec;
162
163 ec.setClusterTolerance (segradius);
164 ec.setMinClusterSize (50);
165 ec.setMaxClusterSize (100000);
166 ec.setSearchMethod (segtree);
167 ec.setInputCloud (doncloud);
168 ec.extract (cluster_indices);
169
170 int j = 0;
171 for (const auto& cluster : cluster_indices)
172 {
173 pcl::PointCloud<PointNormal>::Ptr cloud_cluster_don (new pcl::PointCloud<PointNormal>);
174 for (const auto& idx : cluster.indices)
175 {
176 cloud_cluster_don->points.push_back ((*doncloud)[idx]);
177 }
178
179 cloud_cluster_don->width = cloud_cluster_don->size ();
180 cloud_cluster_don->height = 1;
181 cloud_cluster_don->is_dense = true;
182
183 //Save cluster
184 std::cout << "PointCloud representing the Cluster: " << cloud_cluster_don->size () << " data points." << std::endl;
185 std::stringstream ss;
186 ss << "don_cluster_" << j << ".pcd";
187 writer.write<pcl::PointNormal> (ss.str (), *cloud_cluster_don, false);
188 ++j;
189 }
190}
Compiling and running the program
Add the following lines to your CMakeLists.txt file:
1cmake_minimum_required(VERSION 3.5 FATAL_ERROR)
2
3project(don_segmentation)
4
5find_package(PCL 1.7 REQUIRED)
6
7add_executable (don_segmentation don_segmentation.cpp)
8target_link_libraries (don_segmentation ${PCL_LIBRARIES})
Create a build directory, and build the executable:
$ mkdir build
$ cd build
$ cmake ..
$ make
After you have made the executable, you can run it. Simply run:
$ ./don_segmentation <inputfile> <smallscale> <largescale> <threshold> <segradius>
The Explanation
Large/Small Radius Normal Estimation
pcl::search::Search<PointXYZRGB>::Ptr tree;
if (cloud->isOrganized ())
{
tree.reset (new pcl::search::OrganizedNeighbor<PointXYZRGB> ());
}
else
{
tree.reset (new pcl::search::KdTree<PointXYZRGB> (false));
}
// Set the input pointcloud for the search tree
tree->setInputCloud (cloud);
We will skip the code for loading files and parsing command line arguments, and go straight to the first major PCL calls. For our later calls to calculate normals, we need to create a search tree. For organized data (i.e. a depth image), a much faster search tree is the OrganizedNeighbor search tree. For unorganized data, i.e. LiDAR scans, a KDTree is a good option.
pcl::NormalEstimationOMP<PointXYZRGB, PointNormal> ne;
ne.setInputCloud (cloud);
ne.setSearchMethod (tree);
/**
* NOTE: setting viewpoint is very important, so that we can ensure
* normals are all pointed in the same direction!
*/
ne.setViewPoint (std::numeric_limits<float>::max (), std::numeric_limits<float>::max (), std::numeric_limits<float>::max ());
// calculate normals with the small scale
This is perhaps the most important section of code, estimating the normals. This is also the bottleneck computationally, and so we will use the pcl::NormalEstimationOMP class which makes use of OpenMP to use many threads to calculate the normal using the multiple cores found in most modern processors. We could also use the standard single-threaded class pcl::NormalEstimation, or even the GPU accelerated class pcl::gpu::NormalEstimation. Whatever class we use, it is important to set an arbitrary viewpoint to be used across all the normal calculations - this ensures that normals estimated at different scales share a consistent orientation.
Note
For information and examples on estimating normals, normal ambiguity, and the different normal estimation methods in PCL, please read the Estimating Surface Normals in a PointCloud tutorial.
std::cout << "Calculating normals for scale..." << scale1 << std::endl;
pcl::PointCloud<PointNormal>::Ptr normals_small_scale (new pcl::PointCloud<PointNormal>);
ne.setRadiusSearch (scale1);
ne.compute (*normals_small_scale);
// calculate normals with the large scale
std::cout << "Calculating normals for scale..." << scale2 << std::endl;
pcl::PointCloud<PointNormal>::Ptr normals_large_scale (new pcl::PointCloud<PointNormal>);
ne.setRadiusSearch (scale2);
ne.compute (*normals_large_scale);
Next we calculate the normals using our normal estimation class for both the large and small radius. It is important to use the NormalEstimation.setRadiusSearch() method v.s. the NormalEstimation.setMaximumNeighbours() method or equivalent. If the normal estimate is restricted to a set number of neighbours, it may not be based on the complete surface of the given radius, and thus is not suitable for the Difference of Normals features.
Note
For large supporting radii in dense point clouds, calculating the normal would be a very computationally intensive task potentially utilizing thousands of points in the calculation, when hundreds are more than enough for an accurate estimate. A simple method to speed up the calculation is to uniformly subsample the pointcloud when doing a large radius search, see the full example code in the PCL distribution at examples/features/example_difference_of_normals.cpp for more details.
Difference of Normals Feature Calculation
PointCloud<PointNormal>::Ptr doncloud (new pcl::PointCloud<PointNormal>);
copyPointCloud (*cloud, *doncloud);
We can now perform the actual Difference of Normals feature calculation using our normal estimates. The Difference of Normals result is a vector field, so we initialize the point cloud to store the results in as a pcl::PointNormal point cloud, and copy the points from our input pointcloud over to it, so we have what may be regarded as an uninitialized vector field for our point cloud.
pcl::DifferenceOfNormalsEstimation<PointXYZRGB, PointNormal, PointNormal> don;
don.setInputCloud (cloud);
don.setNormalScaleLarge (normals_large_scale);
don.setNormalScaleSmall (normals_small_scale);
if (!don.initCompute ())
{
std::cerr << "Error: Could not initialize DoN feature operator" << std::endl;
exit (EXIT_FAILURE);
}
// Compute DoN
don.computeFeature (*doncloud);
We instantiate a new pcl::DifferenceOfNormalsEstimation class to take care of calculating the Difference of Normals vector field.
The pcl::DifferenceOfNormalsEstimation class has 3 template parameters, the first corresponds to the input point cloud type, in this case pcl::PointXYZRGB, the second corresponds to the type of the normals estimated for the point cloud, in this case pcl::PointNormal, and the third corresponds to the vector field output type, in this case also pcl::PointNormal. Next we set the input point cloud and give both of the normals estimated for the point cloud, and check that the requirements for computing the features are satisfied using the pcl::DifferenceOfNormalsEstimation::initCompute() method. Finally we compute the features by calling the pcl::DifferenceOfNormalsEstimation::computeFeature() method.
Note
The pcl::DifferenceOfNormalsEstimation class expects the given point cloud and normal point clouds indices to match, i.e. the first point in the input point cloud’s normals should also be the first point in the two normal point clouds.
Difference of Normals Based Filtering
While we now have a Difference of Normals vector field, we still have the complete point set. To begin the segmentation process, we must actually discriminate points based on their Difference of Normals vector result. There are a number of common quantities you may want to try filtering by:
Quantity |
PointNormal Field |
Description |
Usage Scenario |
|---|---|---|---|
|
float normal[3] |
DoN vector |
Filtering points by relative DoN angle. |
|
float curvature |
DoN |
Filtering points by scale membership, large magnitude indicates point has a strong response at then given scale parameters |
|
float normal[0] |
DoN vector x component |
Filtering points by orientable scale, i.e. building
facades with large
large |
|
float normal[1] |
DoN vector y component |
|
|
float normal[2] |
DoN vector z component |


 norm
norm ,
, and/or
and/or  and
small
and
small 
 ,
, ,
,In this example we will do a simple magnitude threshold, looking for objects of a scale regardless of their orientation in the scene. To do so, we must create a conditional filter:
pcl::ConditionOr<PointNormal>::Ptr range_cond (
new pcl::ConditionOr<PointNormal> ()
);
range_cond->addComparison (pcl::FieldComparison<PointNormal>::ConstPtr (
new pcl::FieldComparison<PointNormal> ("curvature", pcl::ComparisonOps::GT, threshold))
);
// Build the filter
pcl::ConditionalRemoval<PointNormal> condrem;
condrem.setCondition (range_cond);
condrem.setInputCloud (doncloud);
pcl::PointCloud<PointNormal>::Ptr doncloud_filtered (new pcl::PointCloud<PointNormal>);
// Apply filter
condrem.filter (*doncloud_filtered);
After we apply the filter we are left with a reduced pointcloud consisting of the points with a strong response with the given scale parameters.
Note
For more information on point cloud filtering and building filtering conditions, please read the Removing outliers using a ConditionalRemoval filter tutorial.
Clustering the Results
std::cout << "Clustering using EuclideanClusterExtraction with tolerance <= " << segradius << "..." << std::endl;
pcl::search::KdTree<PointNormal>::Ptr segtree (new pcl::search::KdTree<PointNormal>);
segtree->setInputCloud (doncloud);
std::vector<pcl::PointIndices> cluster_indices;
pcl::EuclideanClusterExtraction<PointNormal> ec;
ec.setClusterTolerance (segradius);
ec.setMinClusterSize (50);
ec.setMaxClusterSize (100000);
ec.setSearchMethod (segtree);
ec.setInputCloud (doncloud);
ec.extract (cluster_indices);
Finally, we are usually left with a number of objects or regions with good isolation, allowing us to use a simple clustering algorithm to segment the results. In this example we used Euclidean Clustering with a threshold equal to the small radius parameter.
Note
For more information on point cloud clustering, please read the Euclidean Cluster Extraction tutorial.
After the segmentation the cloud viewer window will be opened and you will see something similar to those images:

References/Further Information
“Difference of Normals as a Multi-Scale Operator in Unorganized Point Clouds” <http://arxiv.org/abs/1209.1759>.
Note
@ARTICLE{2012arXiv1209.1759I, author = {{Ioannou}, Y. and {Taati}, B. and {Harrap}, R. and {Greenspan}, M.}, title = “{Difference of Normals as a Multi-Scale Operator in Unorganized Point Clouds}”, journal = {ArXiv e-prints}, archivePrefix = “arXiv”, eprint = {1209.1759}, primaryClass = “cs.CV”, keywords = {Computer Science - Computer Vision and Pattern Recognition}, year = 2012, month = sep, }
“The KITTI Vision Benchmark Suite” <http://www.cvlibs.net/datasets/kitti/>.
“KITTI PCL Toolkit” <https://github.com/yanii/kitti-pcl>