Estimating VFH signatures for a set of points
This document describes the Viewpoint Feature Histogram ([VFH]) descriptor, a novel representation for point clusters for the problem of Cluster (e.g., Object) Recognition and 6DOF Pose Estimation.
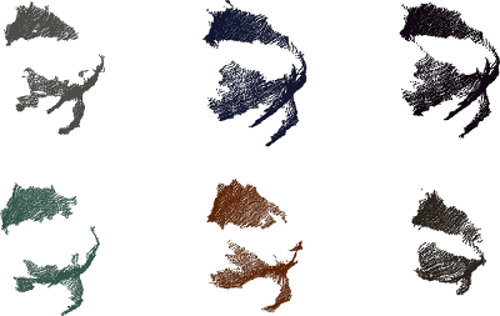
The image below exhibits an example of VFH recognition and pose estimation. Given a set of train data (top row, bottom row except the leftmost point cloud), a model is learned and then a cloud (bottom left part) is used to query/test the model. The matched results in order from best to worst go from left to right starting at bottom left. For more information please see Cluster Recognition and 6DOF Pose Estimation using VFH descriptors and/or [VFH].
Theoretical primer
The Viewpoint Feature Histogram (or VFH) has its roots in the FPFH descriptor (see Fast Point Feature Histograms (FPFH) descriptors). Due to its speed and discriminative power, we decided to leverage the strong recognition results of FPFH, but to add in viewpoint variance while retaining invariance to scale.
Our contribution to the problem of object recognition and pose identification was to extend the FPFH to be estimated for the entire object cluster (as seen in the figure below), and to compute additional statistics between the viewpoint direction and the normals estimated at each point. To do this, we used the key idea of mixing the viewpoint direction directly into the relative normal angle calculation in the FPFH.
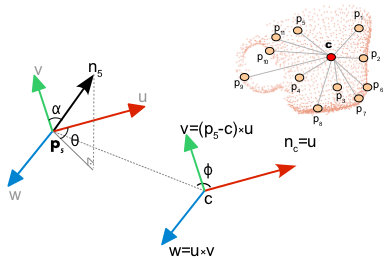
The viewpoint component is computed by collecting a histogram of the angles that the viewpoint direction makes with each normal. Note, we do not mean the view angle to each normal as this would not be scale invariant, but instead we mean the angle between the central viewpoint direction translated to each normal. The second component measures the relative pan, tilt and yaw angles as described in Fast Point Feature Histograms (FPFH) descriptors but now measured between the viewpoint direction at the central point and each of the normals on the surface.
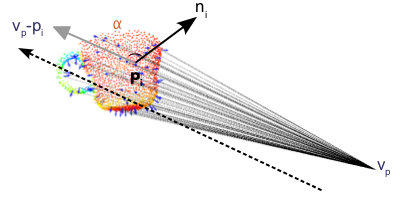
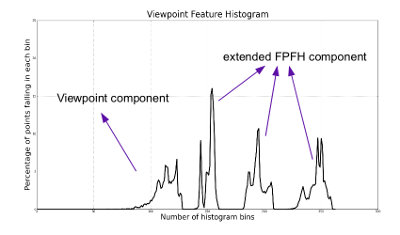
The new assembled feature is therefore called the Viewpoint Feature Histogram (VFH). The figure below presents this idea with the new feature consisting of two parts:
a viewpoint direction component and
a surface shape component comprised of an extended FPFH.
Estimating VFH features
The Viewpoint Feature Histogram is implemented in PCL as part of the pcl_features library.
The default VFH implementation uses 45 binning subdivisions for each of the three extended FPFH values, plus another 45 binning subdivisions for the distances between each point and the centroid and 128 binning subdivisions for the viewpoint component, which results in a 308-byte array of float values. These are stored in a pcl::VFHSignature308 point type.
The major difference between the PFH/FPFH descriptors and VFH, is that for a given point cloud dataset, only a single VFH descriptor will be estimated, while the resultant PFH/FPFH data will have the same number of entries as the number of points in the cloud.
The following code snippet will estimate a set of VFH features for all the points in the input dataset.
1#include <pcl/point_types.h>
2#include <pcl/features/vfh.h>
3
4{
5 pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
6 pcl::PointCloud<pcl::Normal>::Ptr normals (new pcl::PointCloud<pcl::Normal> ());
7
8 ... read, pass in or create a point cloud with normals ...
9 ... (note: you can create a single PointCloud<PointNormal> if you want) ...
10
11 // Create the VFH estimation class, and pass the input dataset+normals to it
12 pcl::VFHEstimation<pcl::PointXYZ, pcl::Normal, pcl::VFHSignature308> vfh;
13 vfh.setInputCloud (cloud);
14 vfh.setInputNormals (normals);
15 // alternatively, if cloud is of type PointNormal, do vfh.setInputNormals (cloud);
16
17 // Create an empty kdtree representation, and pass it to the FPFH estimation object.
18 // Its content will be filled inside the object, based on the given input dataset (as no other search surface is given).
19 pcl::search::KdTree<pcl::PointXYZ>::Ptr tree (new pcl::search::KdTree<pcl::PointXYZ> ());
20 vfh.setSearchMethod (tree);
21
22 // Output datasets
23 pcl::PointCloud<pcl::VFHSignature308>::Ptr vfhs (new pcl::PointCloud<pcl::VFHSignature308> ());
24
25 // Compute the features
26 vfh.compute (*vfhs);
27
28 // vfhs->size () should be of size 1*
29}
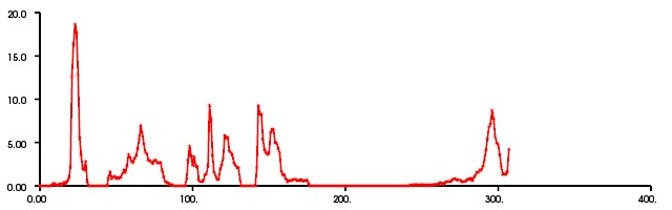
Visualizing VFH signatures
libpcl_visualization contains a special PCLHistogramVisualization class, which is also used by pcl_viewer to automatically display the VFH descriptors as a histogram of float values. For more information, please see http://www.pointclouds.org/documentation/overview/visualization.php.
Note
@InProceedings{Rusu10IROS, author = {Radu Bogdan Rusu and Gary Bradski and Romain Thibaux and John Hsu}, title = {Fast 3D Recognition and Pose Using the Viewpoint Feature Histogram}, booktitle = {Proceedings of the 23rd IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, year = {2010}, address = {Taipei, Taiwan}, month = {October} }